Японские дома, которые парят в воздухе
В марте 2011 года в Японии произошло мощное землетрясение магнитудой 9,1, унесшее 16 000 человеческих жизней. Островное государство нередко страдает от подобной стихии. Инженеры компании Air Danshin (ныне Sansei AIR Seismic Isolation System) во главе с Шоичи Сакамото задумались о том, как можно было бы спасти многие человеческие жизни и имущество во время толчков. Так родился проект дома на воздушной подушке.
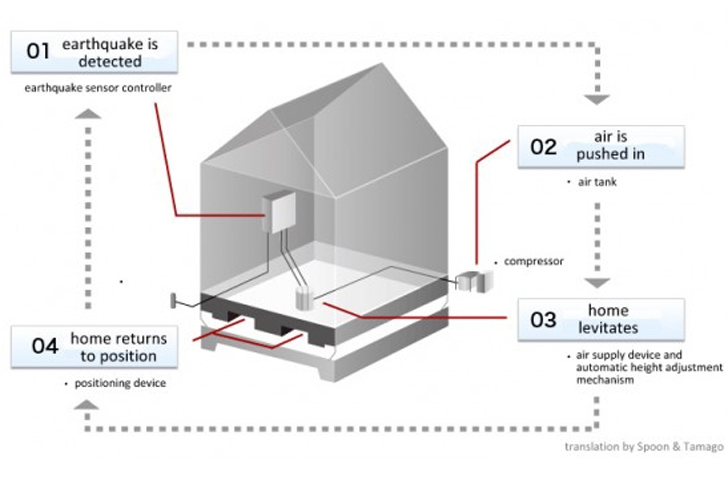
Принцип работы следующий: по периметру здания установлены специальные датчики, которые реагируют в случае сейсмической угрозы, активируя тем самым нагнетательный компрессор, расположенный на внешней стене. Тот в свою очередь мгновенно нагнетает воздух над фундаментом, приподнимая здание на 3 см. На случай отключения питания предусмотрены аварийные батареи.
Внутренний клапан контролирует поток воздуха под строением, поддерживая устойчивость дома во время «левитации». После прекращения толчков, дом плавно возвращается на фундамент. Стоимость установки составляет около $ 30 тыс. Систему уже внедрили при строительстве нескольких малоэтажных домов.
Например, одна из хозяек такого дома в городе Цукуба рассказала, что когда случилось землетрясение магнитудой 6,0, система сработала настолько успешно, что даже кот не проснулся.
Это не первая разработка, призванная противостоять стихии. Однако, по словам представителей Air Danshin, на сегодняшний день их предложение является наиболее бюджетным. Стоимость установки составляет около $ 30 тыс. в зависимости от площади постройки.
Компания продолжает разработки, чтобы усовершенствовать систему и внедрить ее при строительстве более крупных объектов.
Подписывайтесь и будьте с нами:



Последнее изменение: 06.02.2020
Статья размещена Страница «Технологии».
Похожие статьи

История становления ГНБ бизнеса. Риски и первые объемы!